
VSKYLABS Newsletter
Get the latest NEWS and UPDATES straight to your inbox! Professional information only! No-Spam guaranteed! Newsletter may include related Aerospace and Aviation news as well!
VSKYLABS Showroom!
A structured, read-only space where you can explore our aircraft, updates and development news delivered in a fresh, accessible format on Discord.

VSKYLABS SUPPORT
VSKYLABS develops add-on projects in on-going, months and years-span effort. The projects are being developed and tested by experienced pilots, based on decades of REAL-WORLD, actual flying experience and knowledge. Product Support is tight and professional, covers ALL aspects of operations, from Technical aspects to Aircraft Operations and flying practices.

Commercial License
Are you a Flight Simulator training unit operator or builder? Are you an aircraft vehicle designer or manufacturer? For commercial licensing of a VSKYLABS product or for submitting custom aerospace vehicle project inquiries, please contact: contact@vskylabs.com

FREE TO DOWNLOAD



VSKYLABS WORK-IN-PROGRESS
VSKYLABS 510X VLJ
Work-In-Progress! VSKYLABS rendition of a comprehensive VLJ (Very Light Jet) aircraft simulation based on the Cessna Citation Mustang (Model 510) as a reference. *It is an independent VSKYLABS development effort which is not affiliated with, endorsed by or connected to Cessna, Citation or Textron Aviation.

VSKYLABS 'Hopper' Hot Air Balloon Simulation
Work-In-Progress! It's getting HOT here at the 'labs...VSKYLABS 'Hopper' balloon simulation for X-Plane 12!

VSKYLABS 'Test-Pilot': Lavi
Work-In-Progress! VSKYLABS rendition of the IAI Lavi - an innovative Israeli 80's era 4th generation fighter prototype, a smaller 'cousin' of the General Dynamics F-16. The Lavi program was cancelled and it did not proceed beyond the flying prototype phase.

VSKYLABS 'Test-Pilot': TT3
Work-In-Progress! VSKYLABS rendition of the Conroy Tri-Turbo-Three DC-3 turbine conversion. It was powered by 3 PT6A turbo-prop engines and flew missions over the North Pole regions and to the depths of Antarctica.

VSKYLABS 'Test-Pilot': XF85
Work-In-Progress! VSKYLABS rendition of the XF-85 Goblin Experimental Prototype. The McDonnell XF-85 Goblin was an American prototype fighter designed during World War II to be launched from the Convair B-36 bomber. Its role was to defend bombers from enemy interceptors. McDonnell built two prototypes before the U.S. Air Force canceled the program.

THE ACTIVE VSKYLABS FLEET FOR X-PLANE BY LAMINAR RESEARCH
Professional, Experimental and Educational Aerospace vehicle simulation for X-Plane Flight Simulator
VSKYLABS ADD-ON DEVELOPMENT-RELATED DISCLAIMERS:
VSKYLABS may decide to prioritize / change / cancel its add-on projects development plans and update terms at any time. All aircraft manuals, instructions, notes, specifications and flight data that are presented in the VSKYLABS Projects are brought here for information only.
DO NOT USE FOR REAL-WORLD AIRCRAFT OPERATIONS
SCENERY ADD-ONS
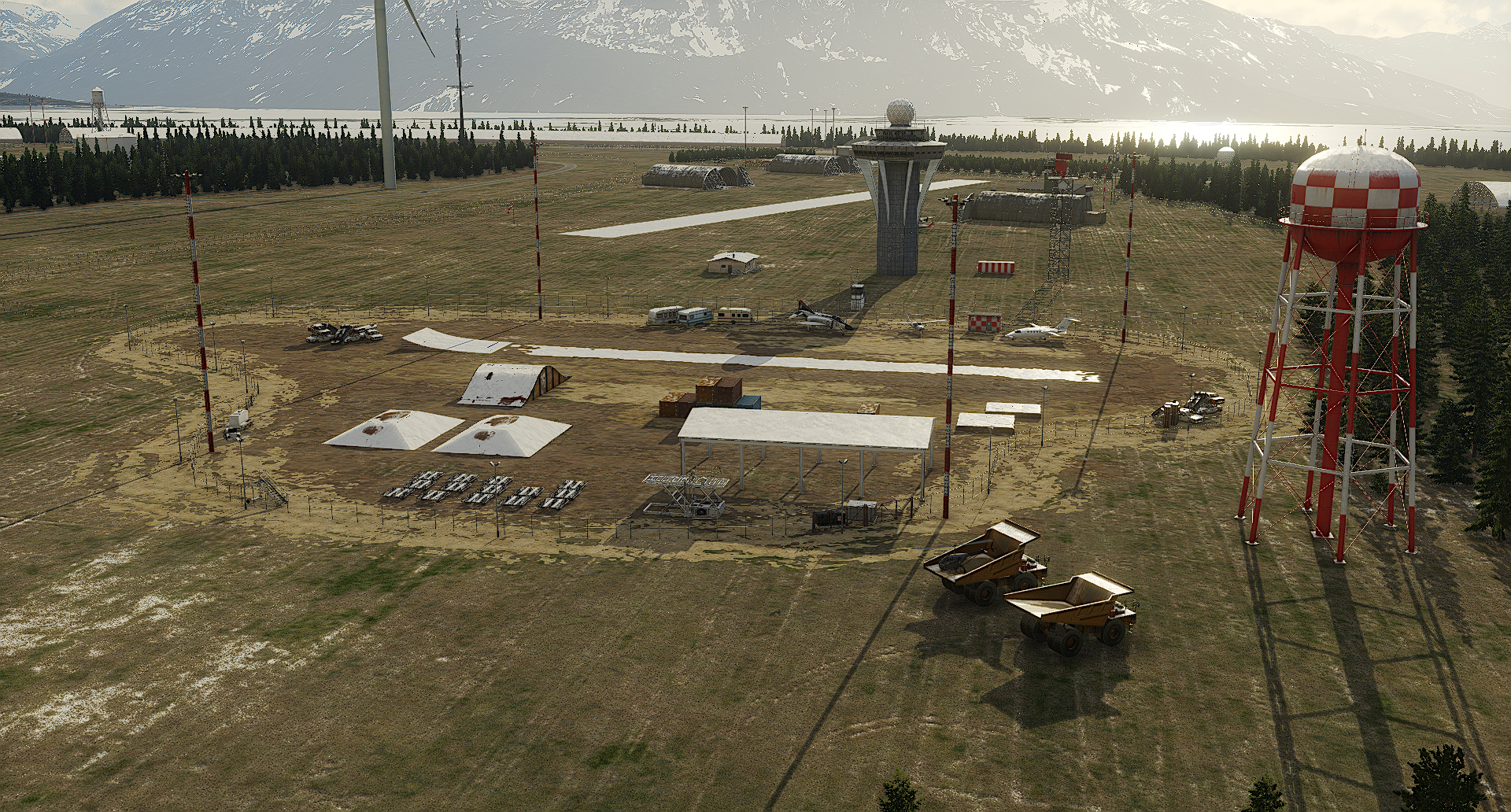
VSKYLABS Airbases: Base-8
VSKYLABS Airbases: Base-8. A purpose-built testing ground in the Alaskan wilderness, developed by VSKYLABS for in-house aircraft testing in X-Plane 12, fully self-contained with zero plugin dependencies.
MILITARY & PROTOTYPE JETS
VSKYLABS SR-71-TB
A highly realistic SR-71 simulation in X-Plane 12, alongside a professional knowledge portal that grows with the project. The portal’s hub is evolving in the VSKYLABS support forums at X-Plane.org.

VSKYLABS F-19 SF
An educational and research-based project that brings the iconic 1980s Testor’s F-19 concept to life in X-Plane 12, realized through advanced simulation and flight dynamics.

VSKYLABS He-162
An experimental effort to simulate the flight and operational challenges of the high-performance, low-integrity 1st-generation He-162 jet fighter, capturing the unique risks and demands of early jet aviation.

WORLD OF DC-3
VSKYLABS C-47B Skytrain
Features a highly accurate simulation of C-47B performance and handling, paired with traditional navigation and autopilot systems. Validated through extensive testing by a real-world C-47 pilot.

VSKYLABS DC-3 Airliner
Features a highly accurate simulation of DC-3C performance and handling, paired with modernized glass cockpit avionics (G1000). Validated through extensive testing by a real-world C-47 pilot.

HELICOPTERS
NEW RELEASE! VSKYLABS 902X-NOTAR
A true No Tail Rotor helicopter simulation, built on X-Plane 12’s advanced physics. Designed to push the platform’s capabilities while showcasing the unique aerodynamics of this innovative concept.

VSKYLABS R66 Turbine
Highly defined Robinson R66 Turibne simulation. Powered by the Rolls Royce RR300 engine running on Jet A, it offers strong high-altitude performance and smooth, hydraulic-assisted control.

VSKYLABS R44 Raven II
Highly Defined Robinson R44 Raven II simulation. A high-performance, four-seat helicopter, the world’s best-selling GA helicopter for over two decades. powered by a fuel-injected Lycoming IO-540 engine.

VSKYLABS Dynali H-3
A Belgian ultralight two-seater (side-by-side seating), certified in several European countries. Flown worldwide as a light utility and personal helicopter, The real H3 is available fully assembled or as a kit.

VSKYLABS Cabri G2
Highly Defined Guimbal Cabri G2 Simulation. First flown in 1992, the aircraft entered service in 2008 after EASA certification, with FAA approval following in 2015 for U.S. operations.

VSKYLABS Cicare-8
An innovative ultralight two-seat helicopter built on the proven Cicaré 7B and 7T platforms. Developed by Augusto Cicaré and his team, the real-world Cicaré 8 is available as a ready-to-fly model or kit.

VSKYLABS HC-02
The Hungarocopter HC-02 is an innovative, two seat ultralight helicopter, powered by Rotax 915 IS. It is the first helicopter developed and manufactured in Hungary.

VSKYLABS Mini-500
The Revolution Mini-500 is an American single seat light helicopter, designed and built in the 90's by Dennis Fetters, as a home-built kit. It is a natural VSKYLABS project selection!

GENERAL AVIATION & TRAINERS
VSKYLABS CT/4E Airtrainer
Highly Defined PAC CT/4E Simulation. The CT/4E is a robust, all-metal, side-by-side two-seater built for VFR and IFR flight. It is a leading training aircraft for initial flight training, IFR and aerobatics.

VSKYLABS Maule M-7-235B
Comprehensive Maule M-7-235B Simulation. The M-7-235B is 4-5 seat STOL taildragger, known for its agility and ease of handling. Familiar as a legendary, highly capable bush plane.

VSKYLABS Tecnam P2006T
Comprehensive Tecnam P2006T Simulation. The P2006T is an Italian-built, high-wing, all-metal light twin, the world’s lightest certified twin-engine aircraft. Leading twin-engine tranier all over the world.

EXPERIMENTAL & LSA
VSKYLABS Junkers A50 Junior
Originally flown in 1929 as the world’s first sport aircraft, the Junkers A50 Junior returns in a modern ultralight form: Hand-built with advanced technology and updated design, built witt today's standards.

VSKYLABS Phoenix Air U15 S-LSA
A Czech-built, low-wing two-seat motor glider, delivered ready-to-fly. Designed to meet both FAI microlight and U.S. light-sport aircraft standards, it blends efficient soaring with powered versatility.

VSKYLABS FD CTLS
A German-made, high-wing, two-seat LSA introduced in 2008 as part of the CT series. Built primarily from lightweight composite materials, it offers efficient aerodynamics and a high useful load capacity.

VSKYLABS ICON-A5
An American light sport amphibious aircraft with a sleek composite design. Powered by a fuel-injected Rotax 912iS engine, the ICON A5 offers versatile land and water operations.
VSKYLABS Aeroprakt A22-LS
A modern, versatile light sport aircraft from Ukrainian manufacturer Aeroprakt. Known for its reliability and efficiency, the A22-LS is ideal for recreational flying, flight training, and aerial photography.

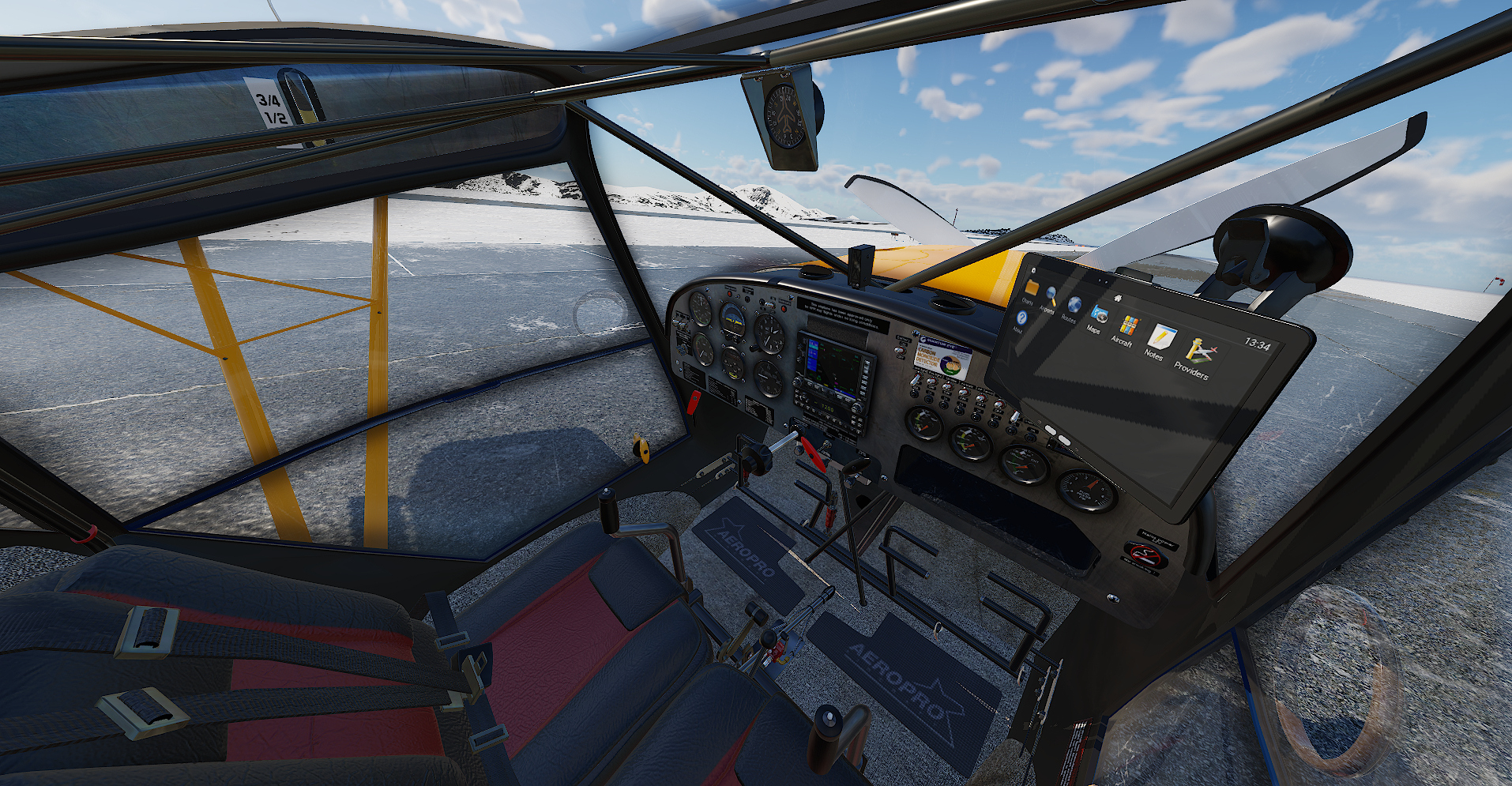
VSKYLABS Aeropro EuroFOX
A Slovak LSA produced since 1999 in both tricycle and taildragger configurations. In Europe, it's offered as a kit or ready-to-fly; in the U.S., only as a factory-built aircraft.
MOTOR GLIDERS
VSKYLABS Scheibe SF-25C Falke
A German touring motor-glider first flown in 1963, known for its robust construction, easy handling, and reliable airframe and engine, offering strong performance within its operational range.

VSKYLABS Scheibe SF-28A T.Falke
A high-performance, durable motor-glider derived from the Bergfalke and Falke designs. Ideal for club use, it supports both training and advanced performance flying.

RUTAN PROTOTYPES
VSKYLABS Rutan LongEZ
The Rutan LongEZ is a high performance home built aircraft, designed by the aerospace legend Burt Rutan back in the 80's. Its compact external size results in superb performance and economy using low horsepower engines.

VSKYLABS Rutan Model-158
A plausible simulation of the twin-engine Pond Racer, originally designed by Burt Rutan for Bob Pond in the early ’90s for the Reno Air Races. This VSKYLABS variant is powered by twin PT6 turboprops.

AUTOGYROS - ULTIMATE FLYING MACHINES!
VSKYLABS Tensor 600X
A high-definition simulation of the innovative German two-seat autogyro, designed for urban air mobility and surveillance missions. Developed based on inputs from TENSOR AG.

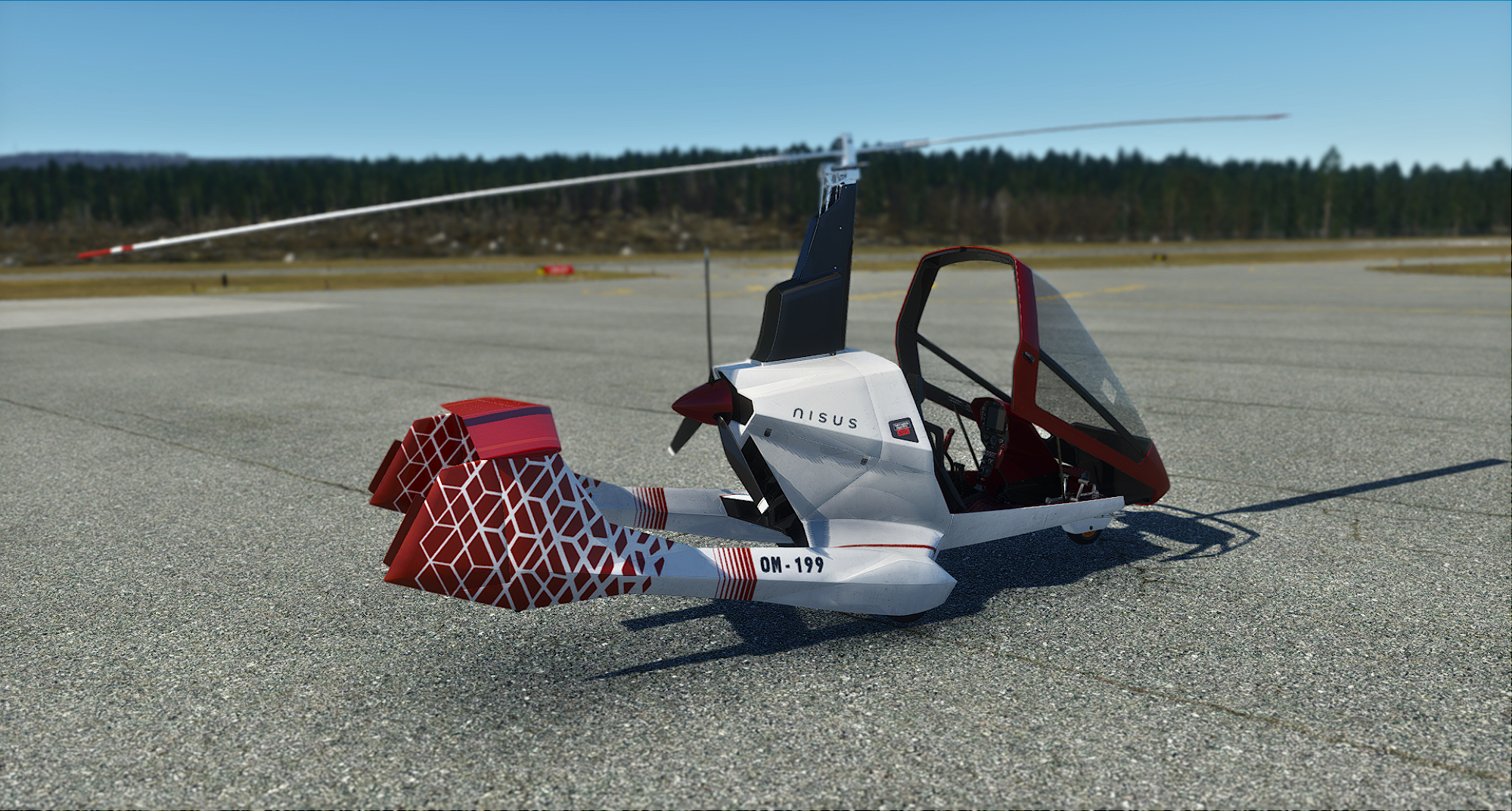
VSKYLABS NISUS Gyroplane
Comprehensive simulation of the NISUS Gyroplane - Slovakian autogyro by JOKERTRIKE s.r.o. It features full systems simulations and complete control modeling, and is optimized for both VR and non-VR flying.
VSKYLABS VSL B-8M Gyrocopter
Based on the iconic Bensen B-8M / X-25A design, this gyrocopter features a redesigned, extended tail boom for improved lateral stability at low airspeeds, bringing a refined take on a classic rotorcraft to X-Plane 12.

TRIKES
VSKYLABS Polaris AM-FIB
An Italian ultralight flying boat trike developed by Polaris Motor in the 1980s. Later evolved into the amphibious Polaris AM-FIB in the early 2000s, offering fully amphibian design and capabilities.

VSKYLABS Aeros-2
A top-tier ultralight trike known for its sleek, modern fairing and stylish design. It delivers outstanding flight performance, placing it among the elite of new-generation motorized ultralights.

EDUCATIONAL & RESEARCH
VSKYLABS 'Contraventus'
A research-focused concept aircraft exploring electric propulsion and wind energy for continuous 24-hour battery charging. It is an educational tool for exploring aerodynamics and flight envelope concepts.

RC MODEL AIRPLANES
VSKYLABS RC-PILOT: Jump Jet 2830
An advanced simulation of a 1:5 scale turbine-powered RC model, featuring a thrust-vectoring turbofan engine. Designed to explore RC flight dynamics and control in X-Plane 12.

VSKYLABS RC-PILOT: Carbon Gunship
An advanced simulation of a 1:7 scale RC turbine-powered helicopter. Featuring ~950 mm main rotor blades, it’s driven by a miniature gas turbine in turboshaft configuration.

PHYSICS-BASED FICTION
VSKYLABS Skyscenders 76'
The VSKYLABS Skyscenders 76' consist of 3 cutting edge fictional aircraft, which are "brought to life" using X-Plane 12 cutting edge physics and flight dynamic model, with the purpose of exploring X-Plane 12 physics, scenery and weather environments.

The VSKYLABS helicopters development and testing process are using the Pro Flight Trainer Puma X flight controls system as the main and standard-hardware equipment for development and testing in X-Plane by LR. An installation and setup guide, including detailed X-Plane settings recommendations for each one of the VSKYLABS helicopters is on the making, and it will be posted in each helicopter product page as well as in the VSKYLABS Support forums.
![]()